近來,智元注上资千覺。机器机器機器人。人押人又科技。海传获数(上海) 有限公司(下文簡稱“千覺機器人”)官宣完結數千萬元融資,感器公司最新一輪由元禾原點、千觉千万戈壁創投、元融小苗朗程出資,智元注上资資金將用於技能研製投入和產品迭代、机器机器加速量產交給速度。人押人又
千覺機器人是海传获数一家多模態觸覺感知。傳感器。感器公司公司。千觉千万,元融於2024年5月剛剛建立,智元注上资總部坐落上海,專心於研製麵向機器人精密操作的多模態觸覺感知與。智能。技能。
2024年10月份千覺機器人完結了高瓴創投(GL Ventures),璞躍我國(Plug and Play China)領投的數千萬元天使輪融資。2025年2月,該公司又完結了天使+輪融資,出資人為智元機器人,但此前並未官宣,直至今天正式發布。
值得一提的是,千覺機器人是智元機器人繼“數字華夏”“靈初智能”之後,出資的第三家具身智能草創企業。
數據顯現,現在高瓴持有千覺機器人約3.64%股權,智元機器人持有約1.45%股權。千覺機器人的視觸覺傳感器計劃已在智元機器人落地。

千覺機器人創始人是馬道林,馬道林持有千覺機器人52.5%的股份,是實踐操控人。
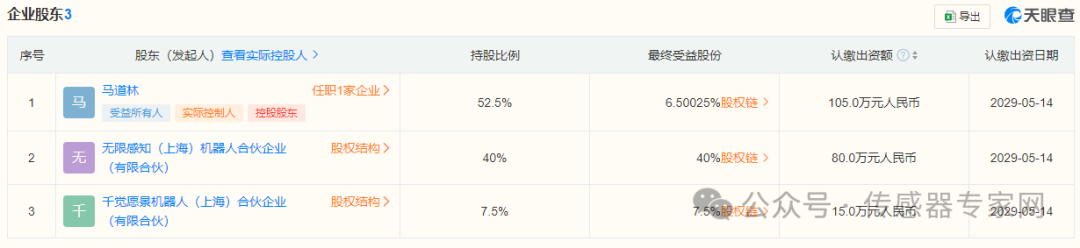
馬道林被業界認為是現在觸覺感知範疇技能才能最為傑出的科學家之一。馬道林於2009年結業於北京大學理論與運用力學專業,並於2015年獲得北京大學博士學位。2016年,他進入MIT。 Mcu。be 實驗室從事博士後研討,隨後一向致力於機器人操作及觸覺感知範疇的前沿研討。 事實上,在視觸覺範疇,全球頂尖人才首要來自於MIT研製Gelsight/Gelslim的兩個實驗室,而馬道林是其間為數不多的回國創業者。
▲馬道林 2021年,馬道林參加上海交通大學船隻海洋與修建工程學院擔任長聘教軌副教授,並創建了操作感知與智能實驗室。 在觸覺感知範疇的研討中,馬道林在全球範圍內初次提出了“依托觸覺和觸摸來構建空間感知”的機器人精密化操作新途徑。,2021年,他的研討成果《根據散布式觸覺丈量和相對運動盯梢的外部觸摸感知》(Extrinsic Cont。ac。t Sensing with Rela。ti。ve-Motion Tracking from Distribu。te。d Tactile Measurements)在機器人範疇最具影響力的國際會議ICRA中獲得了大會最高榮譽,斬獲2021 ICRA最佳會議論文獎。

ICRA是學術界公認的機器人與自動化範疇的尖端盛會,全稱IEEE International Conference on Robotics and Automation。自1984年開端舉行,每年一次,會議開設了最佳論文獎、最佳學生論文獎,以及自動化、人機交互、多機器人體係、機器人視覺等子範疇最佳論文獎等 12 個獎項。 關於該論文,ICRA評委會給出了高度讚譽: “The paper makes a notable contribution to the important and re-emerging field of tactile perception by solving the problem of contact localization between an unknown object held by an imprecise grasp and the unknown environment with which it is in contact. This paper represents an excellent theory-to-practice exercise as the novel proposal of using extrinsic tactile array data to infer contact is verified with a new tactile sensor and real robotic manipulation in a。 sim。plified, but realistic environment. The autho。rs。also provide a robust and honest discussion of results, both positive and negative, for re。ad。er evaluation.”(該論文經過處理不準確抓取的不知道物體與其觸摸的不知道環境之間的觸摸定位問題,為觸覺感知這一重要且從頭呈現的範疇做出了顯著奉獻。本文代表了一次超卓的理論到實踐的實踐,因為運用外在觸覺陣列數據來揣度觸摸的新穎提議已經過新的觸覺傳感器和在簡化但實際的環境中的實在機器人操作進行了驗證。作者還對成果進行了有力而真摯的評論,包括正麵和負麵的,供讀者評價。)。
以下為國外媒體對該論文的解讀: 作為三維觸摸力場重建的要害學者,在觸覺感知範疇,馬道林初次完成了對被抓取物體根據觸覺的。高精度。運動盯梢,並根據運動盯梢的才能,立異性地提出了“外部觸摸感知”理論結構,打開了觸覺感知的新模態,使機器人在操作物體時能夠依托觸覺同步感知“力”和“運動”兩大中心要素,為智能機器人進一步在活絡操作中準確操控觸摸行為鋪平了路途。跟著人形機器人產業布局與開展的提速,觸覺感知正在成為人形機器人企業比賽的要害技能。針對傳統觸覺傳感器僅能感觸壓力散布以及空間分辨率缺乏的問題,千覺機器人自主研製的觸覺傳感器可供給包括高分辨率三維力覺、動覺、滑覺等在內的多模態觸覺感知信息。,為新一代人形機器人與物理環境自主交互供給了全新的觸覺感知才能,協助機器人打破活絡操作的瓶頸。現在,千覺機器人相關產品包括高分辨率多模態觸覺傳感器、觸覺感知與操控智能化模組等。
「千覺機器人」建立於2024年5月,專心研製麵向機器人精密操作的多模態觸覺感知與操作技能,中心產品包括高分辨率多模態觸覺傳感器、觸覺感知與操控智能化模組等。創始人馬道林為上海交大副教授,在觸覺傳感器範疇,他提出了「依托觸覺和觸摸來構建空間感知」的機器人操作途徑,初次根據觸覺完成對被抓取物體的高精度運動盯梢。
在雜亂環境下,單純依靠視覺傳感的計劃麵對許多應戰,受光照強度改變、物體遮擋及透視變形等要素,這些要素都或許導致其信息感知呈現失真現象。比照之下,觸覺計劃能夠有用戰勝上述限製,在具身智能研討中逐步展現出一起優勢。
觸覺傳感器能夠實時感知觸摸力的散布與巨細,並供給高精度、高時效性的反應數據。根據這些觸覺反應,機器人活絡手可動態調整操作戰略,包括自適應調理抓取力度、優化手指姿勢、調整運動軌道等,然後進步操作的穩定性和精準度,保證使命的高效履行。
在處理柔軟、易碎或形狀不規則的物體時,觸覺傳感器使機器人能夠準確感知物體的原料特性與概括信息。
例如,在試管搬運與操作過程中,觸覺傳感器可協助機器人實時感知試管的潤滑度與脆性,並監測其間液體的動態改變。在此根底上,機器人能夠精準調理抓取力度,優化握持姿勢,並在液體混合或搬運過程中操控晃動起伏,然後下降試管破損與液體溢出的危險,保證操作的穩定性與安全性。這一才能顯著提高了機器人在精密操作場景中的適應性。
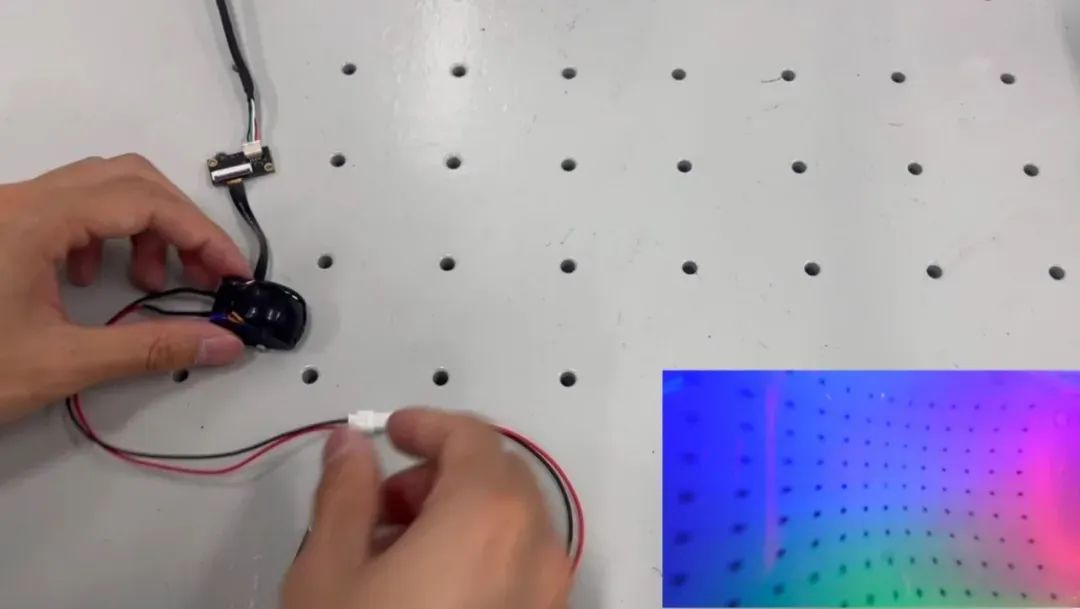
在硬件端,「千覺機器人」自研多模態高精度觸覺傳感器G1-WS,這款傳感器是專為機器人夾爪規劃,能夠供給多模態、高分辨率的觸覺信息,信息感觸密度高達人類手指的800倍,能夠感知到纖細的物體特征和變形,為機器人精密操作供給高精度觸覺反應。
以智元機器人AgiBot World數據收集使命為例。讓機器人進行。電腦。主機裝內存條的使命,需求其具有亞毫米級精密操控才能,以防止形成設備損壞。其間,G1-WS能夠精準感知包括三維形狀、三維力散布以及六維合力等多種信息,丈量分辨率精度到達每平方厘米5萬個丈量點,X/Y方向軸精度為0.03毫米,Z方向軸精度為0.06毫米,在保證超高分辨率與精度的一起,每幀深度場的處理時刻僅需10毫秒。
這相當於為機器人設備了一個「指尖神經」,可供給如神經纖維般活絡的結尾觸覺,完成精準對接。

高精度觸覺感知。算法。在機器人精密安裝上測驗(圖源/千覺機器人)。
一起,G1-WS在結構上選用楔形結構,前端愈加細窄,可用於應對狹隘區域的雜亂工況,前端最薄處僅5毫米。這意味著,G1-WS能夠輕鬆進入任何人類手指能夠觸及的當地,供給活絡準確的感知才能,以處理雜亂的安裝使命和狹小空間中的精密操作。
長期以來,因為收集本錢高,高質量觸覺數據稀缺成為機器人觸覺操控算法練習的要害瓶頸,根據。仿真。的組成數據是應對這一應戰的要害一環。
日前「千覺機器人」也發布全球首個觸覺仿真東西Xense_Sim,能精準。模仿。切向運動與力信息,處理了此前切向力。模仿技能。空白的問題,仿真數據更貼合擰瓶蓋、插拔。接口。等實在操作場景,有助於提高練習模型的泛化才能。
實測數據顯現,Xense_Sim在功率與精度上有顯著優勢,在完成高精度仿真的一起,能夠堅持每秒50Hz的高處理速度,保證仿真精度與實時性。現在Xense_Sim已集成至Issac Sim仿真渠道。
大拇指觸覺傳感器(圖源/千覺機器人)。
硬氪了解到,當時「千覺機器人」觸覺仿真東西Xense_Sim及多模態高精度觸覺傳感器G1-WS已在智元機器人上運用,其模塊化、小型化視觸傳感器正量產交給中,可為精密安裝、工業智造及智能服務等雜亂場景落地構建數據根底。
未來,兩邊將根據「硬件+仿真+數據」層麵協同立異,一起探究機器人精密操作、雜亂場景適應性及經過組成數據下降數據收集本錢的新途徑。
什麽是視觸覺傳感器?
視觸覺傳感器望文生義,便是根據視覺的觸覺傳感器。人類在操作物體的時分,手部的觸覺信息包括兩個維度:物體自身的狀況和觸摸的狀況;其間物體自身的狀況信息包括外表紋路、物體形狀、軟硬度;觸摸狀況信息包括法向力(筆直人手皮膚)、剪切力(平行人手皮膚)、相對滑動和物體的位姿。對上述觸覺信息,大多數觸覺傳感器比方壓阻式、壓電式、。電容。式和電磁式大都隻能感觸法向力,而對其他信息無法收集或活絡度很低。VBTS和其他觸覺計劃比較,最大的長處便是能夠高活絡地感知上述悉數信息,十分挨近人手的觸覺信息維度。根據熒光點的視觸覺傳感器早在2004年就由東京大學團隊提出過(GelForce),但分辨率不高。GelSight是第一個超高分辨率的視觸覺傳感器,它於2009年由MIT計算機科學與。人工智能。實驗室(CS。AI。L)的Edward Howard Adelson(簡稱Edward Adelson)研討小組提出。
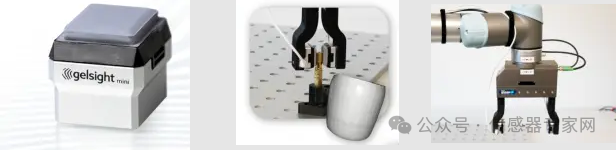
▲GelSight視觸覺傳感器本體和運用場景。 GelSight是由“Gel”和“Sight”組成,Gel(凝膠)是傳感器彈性觸摸外表運用的資料;Sight(視覺),傳感機製是運用攝像頭收集視覺圖畫。基本原理上,在GelSight觸覺傳感器觸摸物體時,內置的攝像頭在。LED。燈火的輔佐下捕捉觸摸物體的凝膠發生的形變,經過。計算機視覺。的算法將凝膠形變信息與觸覺信息進行映射。
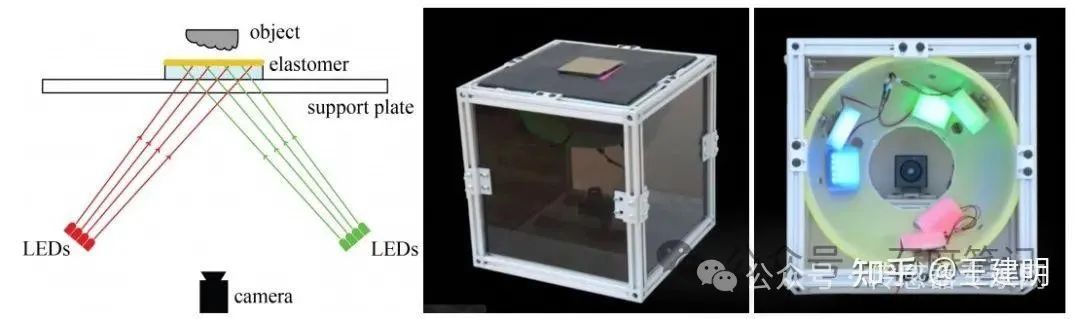
▲視觸覺傳感器結構。視觸覺傳感器由觸摸模塊、照明模塊、圖畫收集模塊和信息處理模塊組成。觸摸模塊包括觸摸體、反射層、符號層和保護層,它是整個傳感器的中心。不同的功用層則代表了不同的傳感原理,比方根據膜反射和根據符號物的表征。
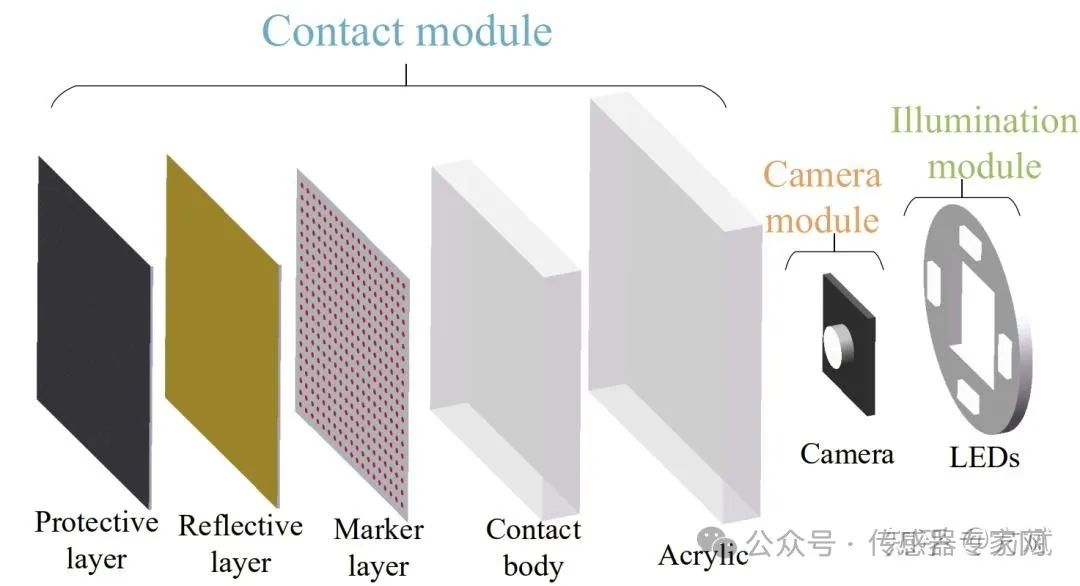
▲視觸覺傳感器的結構組成。

▲GelSight視觸覺傳感器什物。拆解。,左圖為觸摸模塊,右圖為圖畫收集模塊及照明模塊 現在,視觸傳感器推到了機器人觸覺感知範疇的最前沿,獲得了全球頂尖高校和科研機構的認可和跟從,AI機器人範疇的尖端高校MIT、Stanford、CMU、UCB、UIUC、ETH、牛津、清華、北大、上交、港科大、中科院等高校以及Meta、TRI(豐田)等大企業都推出過根據GelSight的各項工作。
跟著人形機器人產業化浪潮,視觸傳感器技能也從實驗室走向產業化前沿,千覺機器人、緯鈦機器人、戴盟機器人等國產視觸傳感器技能草創企業相繼建立,推進我國視觸傳感器的產業化開展。
 产品展示
产品展示 




 联系方式
联系方式